Design and Implementation of a Teleoperated Vehicle with Simulated Transmission and Force Feedback
Bachelor Thesis in Computer Engineering — Federal University of Ceará
- Author
- Inácio Rodrigues de Matos Galvão
- Advisor
- Prof. Dr. José Marques Soares
- Co-advisor
- Eng. Me. Artur Rodrigues Rocha Neto
Hypothesis
Plain UDP over a home Wi-Fi network, combined with force feedback computed from an embedded IMU, is sufficient for responsive teleoperation on low-cost hardware.
Goal
Design, implement and validate a teleoperation architecture for a 1:5-scale Formula 1 vehicle, evaluating latency, packet loss, motor model fidelity, haptic response, autonomy and thermal behavior.
Context and motivation
Teleoperation systems are relevant in mining, space exploration and military operations — where latency and haptic feedback determine task precision. Existing commercial solutions cost over R$ 50,000 and are complex. This work demonstrates that equivalent architecture is viable on R$ 1,300 of open hardware.

Architecture
Three layers: embedded vehicle (Raspberry Pi 4, camera, IMU, motor, servos), PC client (decodes MJPEG video, computes force feedback, shows telemetry) and Logitech G923 simulator. Communication uses three independent UDP ports — video, telemetry and commands — so that video frames don't block the 100 Hz required by haptic feedback.
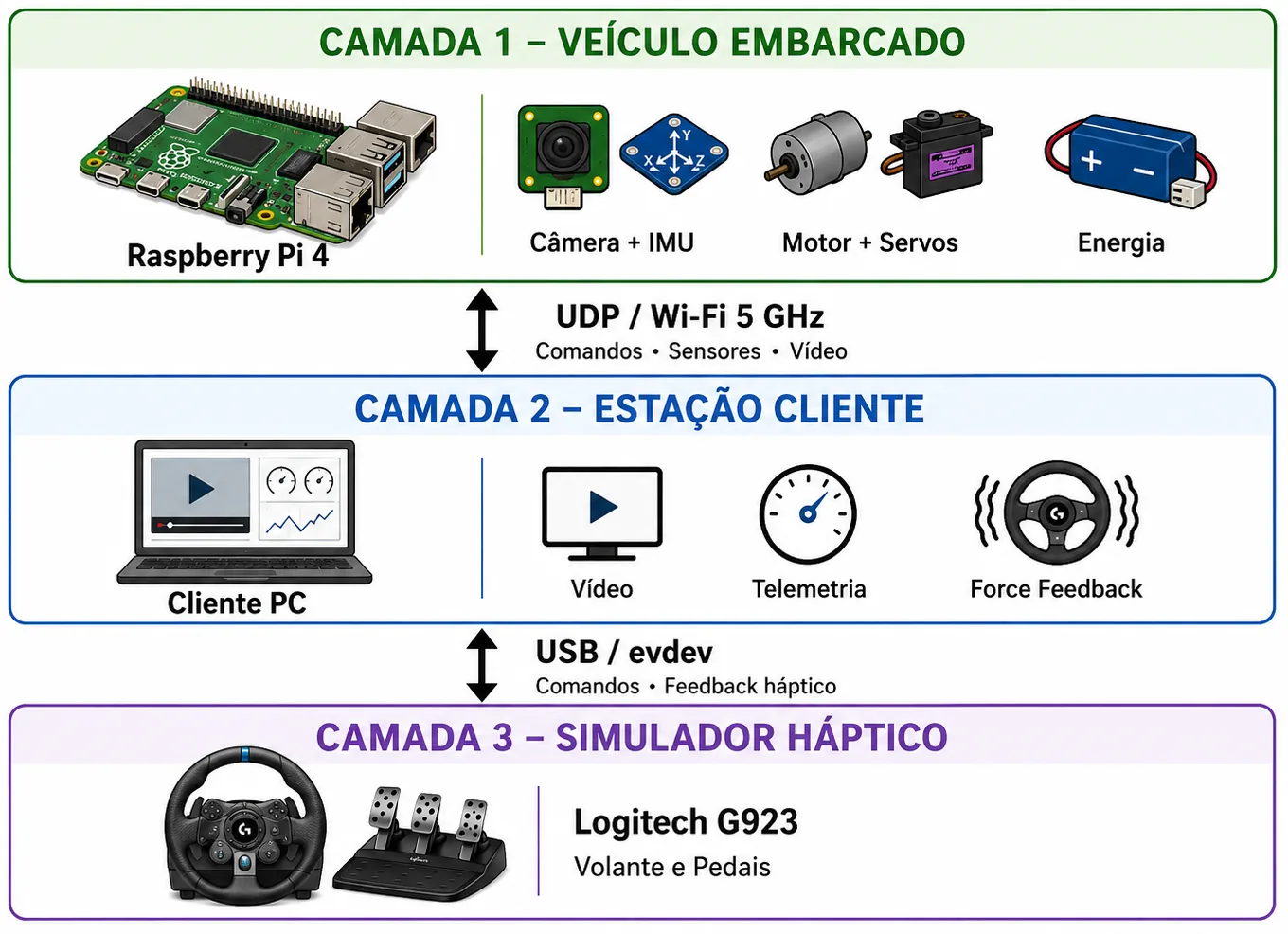
Stack and hardware
Motor model
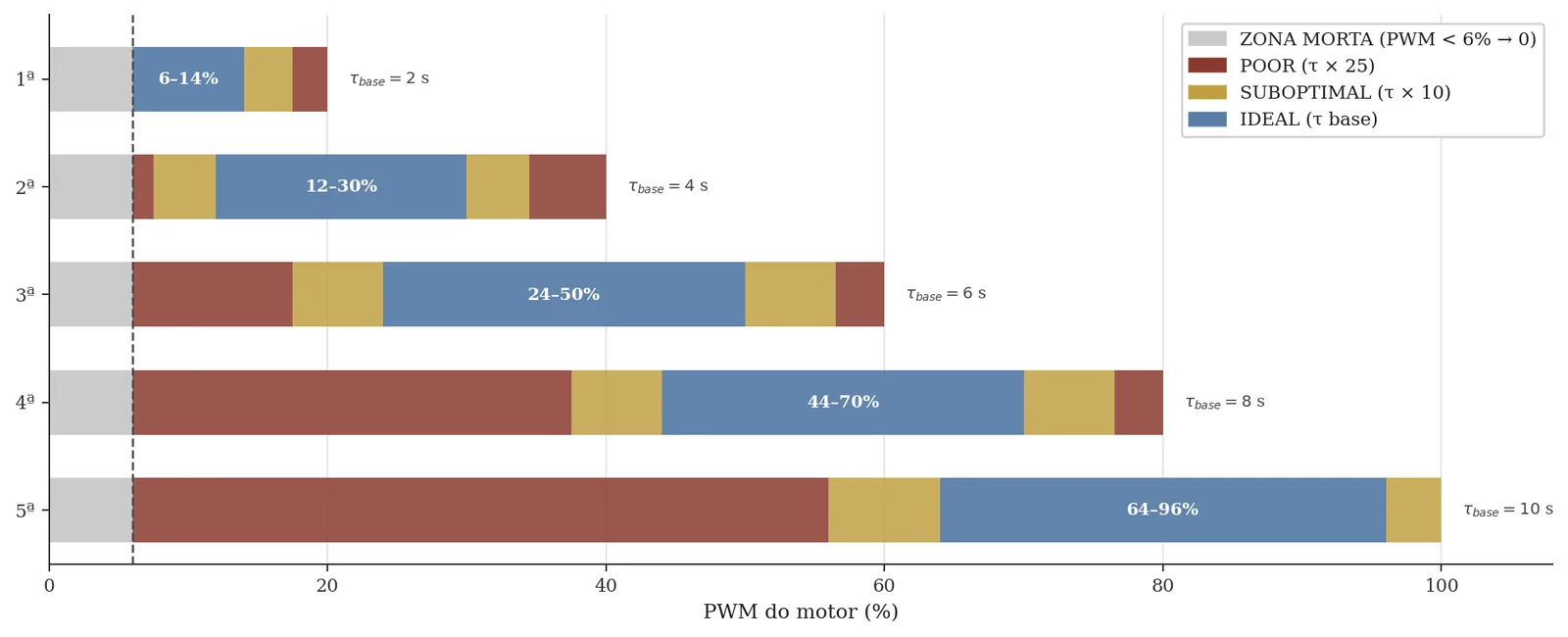
DC 775 motor with five-gear transmission modeled as a first-order system G(s) = K / (τ_eff · s + 1), where τ_eff = τ_base(g) · M_zone. τ_base grows from 2 s (1st gear) to 10 s (5th); M_zone is 1.0 (IDEAL), 10.0 (SUBOPTIMAL) or 25.0 (POOR). Operating in the wrong gear for the RPM range penalizes response, mimicking a real transmission.
Force feedback (G923)
Seven effect types across eight parallel instances: conditional effects (centering, damping, friction, inertia) updated at 1 kHz inside the wheel firmware; lateral force based on BMI160's lateral G at 100 Hz; virtual hard stops at travel limits; and impact vibration synchronized with sensors. Per-effect caching reduced sensor-thread blocking from 12–60 ms to 0–15 ms per packet.

Experiments
13 experimental sessions — 9 indoor (free wheels, 27±2 °C) and 4 outdoor on a 55.81 m track — totaling ~165 min and ~983k aggregated samples.
Results
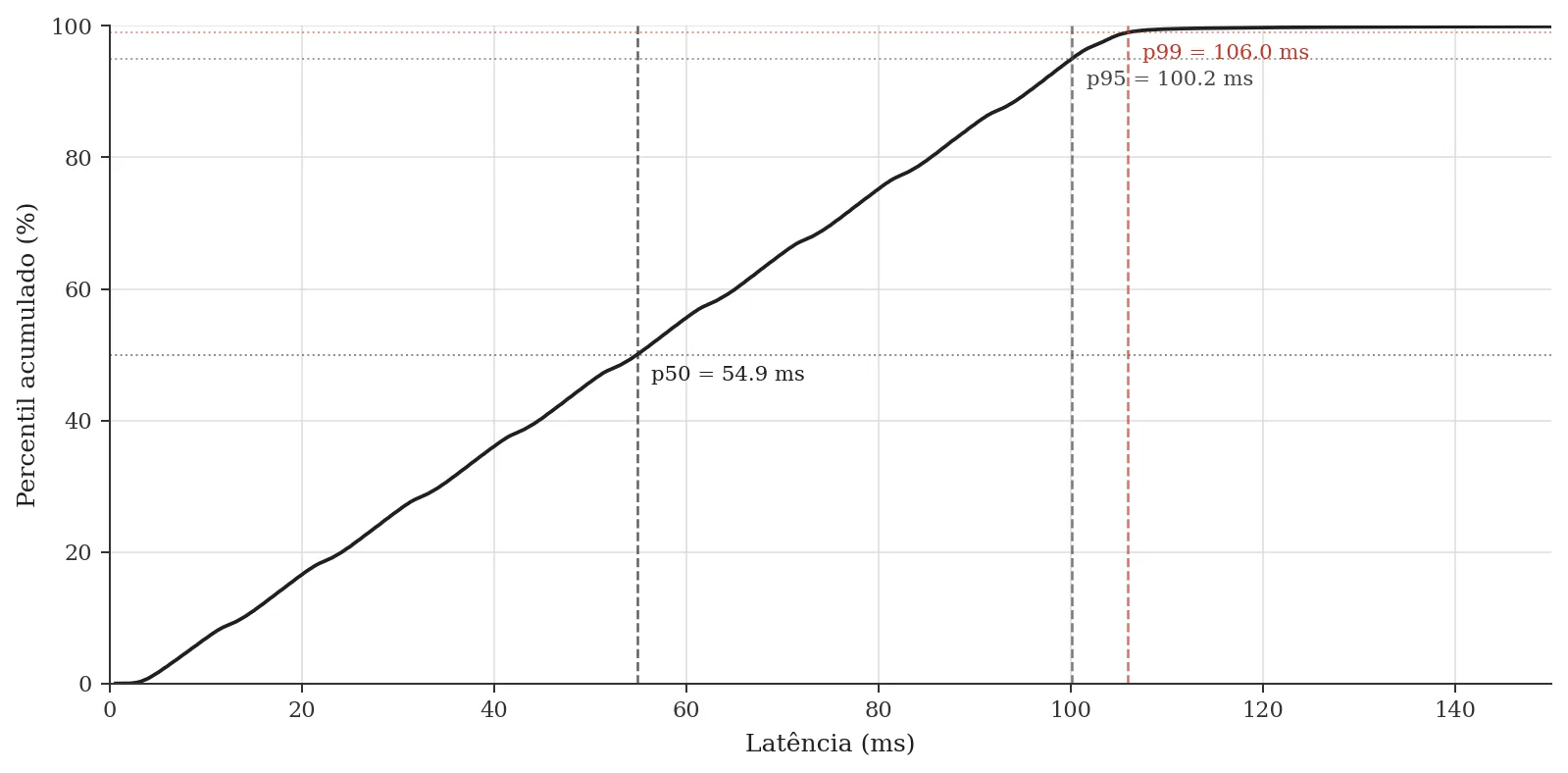
All targets met. End-to-end latency at 1.1× the goal, with bottleneck on shared Wi-Fi — not on the vehicle. Migrating to a dedicated link would reduce p50 by an order of magnitude with no code changes.
Conclusion
Plain UDP + first-order model + direct force feedback deliver responsive teleoperation on low-cost hardware. The main limitation was structural, not electronic: PLA chassis and motor mounts gave way on track. The work validates the hypothesis and opens room for evolution with a metal chassis and dedicated network link.
Bibliographic references
53 references cited in the thesis, grouped by type. Click each category to expand.
Books3
- Gene F. Franklin and J. David Powell and Abbas Emami-Naeini. Sistemas de Controle para Engenharia. Bookman, 2013.
- Rafael C. Gonzalez, Richard E. Woods. Processamento Digital de Imagens. Pearson Prentice Hall, 2009.
- Ruggiero, Márcia A. Gomes and Lopes, Vera Lúcia da Rocha. Cálculo Numérico: Aspectos Teóricos e Computacionais. Makron Books/Pearson, 1996.
Articles33
- Kumari, Mona and Singh, Maheswari Prasad and Singh, Amit Kumar. A latency sensitive and agile IIoT architecture with optimized edge node selection and task scheduling. Digital Communications and Networks, 2025.
- Ito, Koki and Nakazato, Jin and Fontugne, Romain and Tsukada, Manabu and Hiroshi, Esaki. A multipath redundancy communication framework for enhancing 5G mobile communication quality. Computer Communications, 2025.
- Ajayi, Oluwaseun Kayode and Du, Shengzhi and Nahri, Syeda Nadiah Fatima. A review of haptic technologies for hardware-in-the-loop development. Sensors and Actuators Reports, 2025.
- Khodamipour, Gholamreza and Khorashadizadeh, Saeed and Farshad, Mohsen. Adaptive formation control of leader-follower mobile robots using reinforcement learning and the Fourier series expansion. ISA Transactions, 2023.
- Deng, Zhen and Zhang, Shengzhan and Guo, Yuxin and Jiang, Hongqi and Zheng, Xiaochun and He, Bingwei. Assisted teleoperation control of robotic endoscope with visual feedback for nasotracheal intubation. Robotics and Autonomous Systems, 2024.
- Li, Wenwen and Huang, Fanghao and Chen, Zihao and Chen, Zheng. Automatic-switching-based teleoperation framework for mobile manipulator with asymmetrical mapping and force feedback. Mechatronics, 2024.
- Shukla, Ashish and Ross, Robert and Bhattacharya, Bishakh and Stumpf, Alex. Autonomous water sampling and quality monitoring in remote locations: A novel approach using a remote-controlled boat. HardwareX, 2025.
- Manuel, Nelson Luis and Inanç, Nihat and Lüy, Murat. Control and performance analyses of a DC motor using optimized PIDs and fuzzy logic controller. Results in Control and Optimization, 2023.
- Ji, Qinglei and Jansson, Jakob and Sjöberg, Mikael and Wang, Xi Vincent and Wang, Lihui and Feng, Lei. Design and calibration of 3D printed soft deformation sensors for soft actuator control. Mechatronics, 2023.
- Shaik, Zuber Basha and Peddakrishna, Samineni. Design and implementation of electric vehicle with autonomous motion and steering control system using single board computer and sensors. Results in Engineering, 2025.
- Bobrovsky, A. V. and Drobchenko, A. E. and Zotov, A. V. and Gorokhova, D. A. and Chizhatkina, E. D.. Development of a Universal Module for Connecting Sensors to the CAN-bus for the Formula Student Electric Car. Transportation Research Procedia, 2023.
- Shendge, Akshata and Singh, Rajendra and Ansari, Kashif I.B.H. and Pakhrani, Kishita. Development of an unmanned aerial vehicle for remote live streaming on web dashboard. Materials Today: Proceedings, 2023.
- An, Dohyun and Joo, Hyeontae and Kim, Hwangnam. Enabling low-latency digital twins for large-scale UAV networks using MQTT-based communication framework. ICT Express, 2025.
- Dreger, Felix A. and Rinkenauer, Gerhard. Evaluation of different feedback designs for target guidance in human controlled robotic cranes: A comparison between high and low performance groups. Applied Ergonomics, 2024.
- Santos, Vladimir Sousa and Eras, Juan J. Cabello and Ulloa, Mario J. Cabello. Evaluation of the energy saving potential in electric motors applying a load-based voltage control method. Energy, 2024.
- Rodríguez-Arellano, Jesús Abraham and Miranda-Colorado, Roger and Villafuerte-Segura, Raúl and Aguilar, Luis T.. Experimental observer-based delayed control of wheeled mobile robots. Applied Mathematical Modelling, 2025.
- Vashisht, Ankit and Gandhi, Geeta Chhabra and Kalra, Sumit and Saini, Dinesh Kumar. Hybrid robot navigation: Integrating monocular depth estimation and visual odometry for efficient navigation on low-resource hardware. Computers and Electrical Engineering, 2025.
- Graf, Fabian and Watteyne, Thomas and Villnow, Michael. Monitoring performance metrics in low-power wireless systems. ICT Express, 2024.
- Barón, Miguel and Diez, Luis and Zverev, Mihail and Juárez, José R. and Agüero, Ramón. On the performance of Zenoh in Industrial IoT Scenarios. Ad Hoc Networks, 2025.
- Ayinla, Shehu Lukman and Amosa, Temitope Ibrahim and Ibrahim, Oladimeji and Rahman, Md. Siddikur and Bahashwan, Abdulrahman Abdullah and Mostafa, Mohammad Golam and Yusuf, Abdulrahman Olalekan. Optimal control of DC motor using leader-based Harris Hawks optimization algorithm. Franklin Open, 2024.
- Gökçe, Celal Onur and Ipek, Mahmut Esat and Dayıoğlu, Mehmet and Ünal, Rıdvan. Parameter estimation and speed control of real DC motor with low resolution encoder. Results in Control and Optimization, 2025.
- Chen, Sixun and Noguchi, Noboru. Remote safety system for a robot tractor using a monocular camera and a YOLO-based method. Computers and Electronics in Agriculture, 2023.
- Huo, Faren and Wang, Tai and Fang, Fei and Sun, Cong. The influence of tactile feedback in In-vehicle central control interfaces on driver emotions: A comparative study of touchscreens and physical buttons. International Journal of Industrial Ergonomics, 2024.
- Lu, Qiuyu and Li, June and Yuan, Kai and Liu, Kaipei and Ni, Ming and Luo, Jianbo. UDP-RT: A UDP-based reliable transmission scheme for power WAPS. Computer Networks, 2023.
- Iqbal, Faheem and Gohar, Moneeb and Karamti, Hanen and Karamti, Walid and Koh, Seok-Joo and Choi, Jin-Ghoo. Use of QUIC for AMQP in IoT networks. Computer Networks, 2023.
- Xia, Pengxiang and You, Hengxu and Du, Jing. Visual-haptic feedback for ROV subsea navigation control. Automation in Construction, 2023.
- AL-Dhief, Fahad Taha and Sabri, Naseer and Abdul Latiff, N. M. and Nik Abd. Malik, Nik Noordini and Albader, Musatafa Abbas Abbood and Mohammed, Mazin Abed and AL-Haddad, Rami Noori and Salman, Yasir Dawood and Abd Ghani, Mohd Khanapi and Obaid, Omar Ibrahim. Performance Comparison between TCP. International Journal of Engineering \& Technology, 2018, v.7, n.4.36, p.172--176.
- Bekele, Bereket Endale and Tokarz, Krzysztof and Gebeyehu, Nebiyat Yilikal and Pochopie{\'n. Performance Evaluation of UDP. Electronics, 2024, v.13, n.18, p.3697.
- Yang, Bo and Liu, Chao and Zhang, Lei and Teng, Long and Tian, Jiawei and Xu, Siyuan and Zheng, Wenfeng. Novel Design of Three-Channel Bilateral Teleoperation with Communication Delay Using Wave Variable Compensators. Electronics, 2025, v.14, n.13, p.2595.
- Ye, Yang and Zhou, Tianyu and Zhu, Qi and Vann, William and Du, Jing. Brain functional connectivity under teleoperation latency: a fNIRS. Frontiers in Neuroscience, 2024, v.18, p.1416719.
- Ji, Xunbi A. and Avedisov, Sergei S. and Khan, Mohammad Irfan and Vörös, Illés and Altintas, Onur and Orosz, Gábor. On the effects of latency in teleoperated driving: stability and performance analysis. Vehicle System Dynamics, 2025.
- Chang, Yeong-Hwa and Yang, Cheng-Yuan and Lin, Hung-Wei. Robust Adaptive-Sliding-Mode Control for Teleoperation Systems with Time-Varying Delays and Uncertainties. Robotics, 2024, v.13, n.6, p.89.
- Rafiei, Shirin and Singhal, Chetna and Brunnström, Kjell and Andersson, Jonas and Sjöström, Mårten. Laboratory study on quality of experience and user experience for teleoperation. Quality and User Experience, 2026, v.11, n.1.
Conference proceedings1
- Heryana, Ana and Krisnandi, Dikdik and Pardede, Hilman F. and Nurkahfi, Galih Nugraha and Dinata, Mochamad Mardi Marta and Rozie, Andri Fachrur and Firmansyah, Rendra Dwi. Realtime Video Latency Reduction for Autonomous Vehicle Teleoperation Using RTMP. 2022 International Conference on Computer, Control, Informatics and Its Applications (IC3INA), 2022.
Undergraduate theses2
- Machado, Gustavo Barbosa. Comparação de desempenho computacional de protocolos de comunicação para IoT, 2021, , p.38.
- Noronha Neto, Otávio. Explorando a jogabilidade em um jogo FPS, 2023.
Manuals and datasheets7
- {Infineon Technologies AG. BTS7960B -- High Current PN Half Bridge, 2013.
- {Allegro MicroSystems. ACS758 -- Thermally Enhanced, Fully Integrated, Hall-Effect-Based Linear Current Sensor IC, 2018.
- {Bosch Sensortec. BMI160 -- Small, Low Power Inertial Measurement Unit, 2015.
- {Maxim Integrated. DS18B20 -- Programmable Resolution 1-Wire Digital Thermometer, 2019.
- {Texas Instruments. INA219 -- Zero-Drift, Bidirectional Current/Power Monitor with I2C Interface, 2015.
- {NXP Semiconductors. PCA9685 -- 16-channel, 12-bit PWM Fm+ I2C-bus LED controller, 2015.
- {XLSEMI. XL4015 -- 5A 180KHz 36V Buck DC to DC Converter, 2017.
Other (web, standards, specs)7
- {VelocityProjects3D. FV01 -- The Most Advanced 3D Printed RC Formula 1 Car. Printables, 2024.
- {Autodesk. Tinkercad -- From mind to design in minutes. Software de modelagem 3D online, 2024.
- {UltiMaker. UltiMaker Cura -- Trusted by millions of users worldwide. Software fatiador para impressão 3D, 2024.
- {Logitech G. Volante de corrida Sim Logitech G923. Página oficial do produto, 2024.
- {TP-Link. Roteador Mesh Wi-Fi. Página oficial do produto, 2024.
- Belogolovy, Andrey and Dasalukunte, Deepak and Dorrance, Richard and Stupachenko, Evgeny and Zhang, Xue. Low latency communication over commercially available LTE. arXiv preprint arXiv:2209.09794, 2022.
- Black, David Gregory and Tirindelli, Maria and Salcudean, Septimiu and Wein, Wolfgang and Esposito, Marco. Visual-Haptic Model Mediated Teleoperation for Remote Ultrasound. arXiv preprint arXiv:2502.07922, 2025.